 企业邮箱
企业邮箱 开发者中心
开发者中心

 企业邮箱
企业邮箱 开发者中心
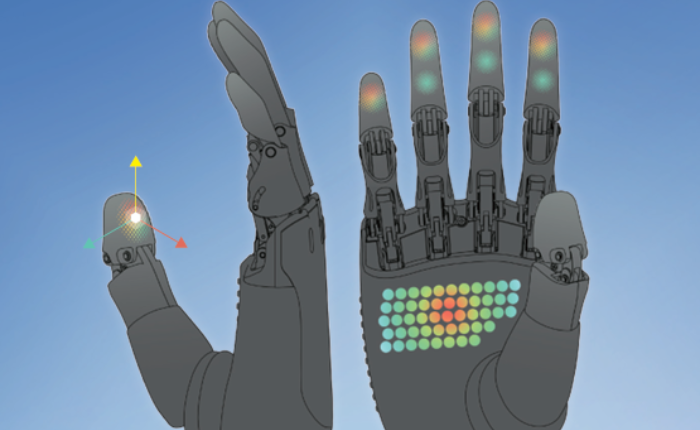
开发者中心重量(含手腕):
575g±5g


3133409.png)
3007781.png)
9526908.png)
8393380.png)
2170463.png)
4404771.png)
1630244.png)
5136271.png)
6337356.png)
4854919.png)
TEL: 021-63210200
业务咨询: info@oymotion.com
销售代理: sales@oymotion.com
技术支持: faq@oymotion.com
加入傲意: hr@oymotion.com
上海地址: 上海市浦东新区半夏路100弄788幢
合肥地址: 合肥市蜀山区望江西路69号西湖国际广场
珠海地址: 珠海市高新区唐家湾镇鼎业路82号B05栋5楼

微信号:oymotion
扫描二维码,获取更多相关资讯

